| 만미터 심해에서 연체로봇의 구동 달성 | ||
|
||
 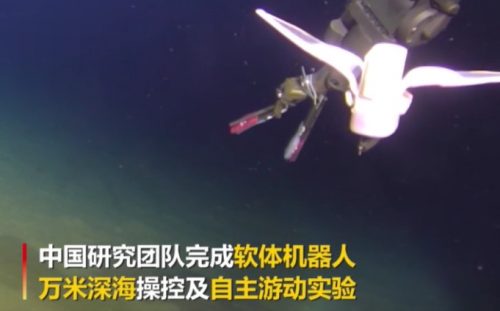 저장(浙江)대학교 연구팀과 즈장(之江)실험실 연구팀은 공동으로 10,000m 심해에서 조작할 수 있는 생체공학 심해 연체로봇을 개발했다. 해당 연구 성과는 2021년 3월 4일 국제학술지 “Nature”에 게재되었다. 기존의 “갑옷식” 항고압 심해 잠수장비와 비교하여, 인체공학 심해 연체로봇은 무게가 가볍고, 구조가 간단하여 심해 탐사의 어려움과 비용을 크게 줄일 수 있다. 또한, 전기와 모터 구동이 필요 없어 소음이 없고 친환경적이다. 연구팀은 마리아나 해구 6,000-11,000 깊이 구간의 극고압 심해 구역에서 생존하는 심해 라이언피쉬(Pterois volitans)에서 영감을 얻었다. 라이언피쉬의 골격은 조각상으로 젤라틴 모양의 유연한 몸체에 분포되어 거의 100메가파스칼의 압력에 견딜 수 있다. 연구팀은 심해 라이언피쉬 머리 골격의 연조직에서의 분산 융합 특징에 기반하여 연질 기판 구조, 재료에 대한 동역학적 설계를 수행하고, 고압력 환경에서의 로봇 체내 응력 상태를 최적화하였다. 생체공학 심해 연체로봇은 길이 22cm, 스팬 너비 25cm의 물고기 모양으로 고압저온 환경에서도 양호한 전기구동 성능을 유지할 수 있는 지능형 연질 소재로 제조되었다. 제어회로, 배터리 등 경질 소자는 젤상의 연질 몸체에 융합되어 내압성 외곽이 필요 없이 10,000m 깊이 심해의 정수압에 견딜 수 있다. 2019년 12월에 마리아나 해구 바닥에서의 해상시험 영상 기록에 따르면, 해심 10,900m 깊이에서 로봇은 안정적인 날개 구동을 달성했다. 2020년 8월 27일, 남중국해 3,224m 해심에서 성공적으로 자율 유동을 달성했다. 향후, 연구팀은 지속적으로 심해 지능화 설비의 에너지, 구동, 감지통합시스템에 대한 심층 연구를 수행하여 생체공학 심해 연체 로봇의 지능을 향상시키고 응용 비용을 줄일 계획이다. 또한, 생체공학 연체 로봇의 핵심 기술을 바티스카프(bathyscaphe)에 적용하여 소형심해 장비를 개발하고 심해 통신, 심해 검사 등 기능을 달성할 계획이다. 정보출처 : https://baijiahao.baidu.com/s?id=1693299424291233935&wfr=spider&for=pc |
SEARCH
- 정책동향
- 이슈리포트
- 통계DB
- 통계DB