| 적외선과 자기장 복합 구동의 소금쟁이 모방 마이크로 로봇 개발 | ||
|
||
 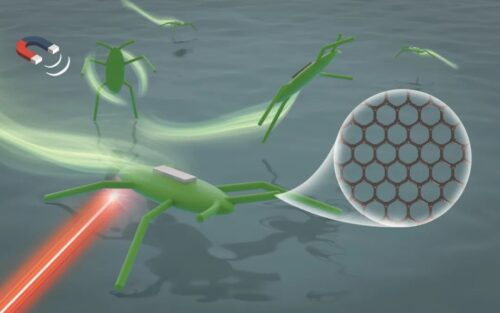 중국과학원 선양(沈陽)자동화연구소 마이크로나노 연구팀은 적외선과 자기장의 복합 구동하에서 프로그래밍 가능한 다중모드 운동을 달성할 수 있는 소금쟁이 모방 마이크로 로봇을 개발했다.(그림1 참조) 소금쟁이는 자연계의 독특한 생물로 물 위에 뜨고 활공과 점프를 할 수 있다. 또한 해당 능력을 이용하여 물에 떨어지는 먹이를 잡아내는 뛰어난 사냥꾼이다. 그림 2a는 수면 위 소금쟁이의 광학 이미지로 소금쟁이는 사지가 길고 물 위를 평지처럼 걷는다. 연구팀은 소금쟁이 신체 구조와 운동 형태를 연구한 결과 이들의 사지가 대량의 미세구조로 분포되어 있음을 발견했다. 그림 2b는 주사형전자현미경으로 관찰한 소금쟁이 다리 구조의 세부적인 특징을 보여준다. 다리에 많은 강모가 자라며 강모의 크기가 매우 작고 강모 사이의 거리도 매우 작다. 이는 소금쟁이 다리와 물의 직접 접촉을 어느 정도 차단하고 물이 소금쟁이 몸에 침투하는 것을 방지할 수 있어 소금쟁이 다리가 초소수성 능력을 갖게 되어 효율적인 운동을 달성할 수 있다. 그림 2c는 소금쟁이 다리를 고정한 후 물방울과 소금쟁이 다리가 접촉할 때 물방울이 소금쟁이 다리에 달라붙지 않음을 보여주며 이는 마이크로 로봇 개발에 참조되었다. 연구팀은 소금쟁이에서 영감을 받아 초소수성 재료를 제조하고 멀티필드 복합 구동 연구를 수행했다. 그림 3a-e는 PDMS와 그래핀을 이용하여 복합 재료를 제조하는 과정을 보여준다. 해당 재료는 광응답 및 초소수성 특성(그림 3g)을 가지며 아울러 우수한 가공 성능을 보유하여 그림 3f와 같이 작업 요구 사항에 따라 다양한 구조 형상으로 가공할 수 있다. 연구팀은 해당 복합소재를 이용하여 소금쟁이 모방 마이크로 로봇을 개발하고 적외선과 자기장을 결합해 로봇의 멀티필드 복합 구동 연구를 수행했다. 적외선 구동하에서 소금쟁이 모방 로봇은 수면에서 유연하게 왕복하고 회전할 수 있다(그림 4a-c). 자기장 구동하에서 소금쟁이 모방 로봇은 수면에서 빠르게 유동하고 180도로 구르고 점프할 수 있다(그림 4d-e). 해당 연구는 신소재 제조와 멀티필드 구동 기술의 융합을 달성하고 곤충 모방 로봇 연구 및 기능화 응용을 위한 새로운 방법을 제공한다. 새로운 기능성 소재와 마이크로 로봇 신기술의 발전에 따라 구조가 새롭고 기능이 독특한 더 많은 마이크로 로봇이 개발되어 미시 세계의 새로운 현상과 새로운 메커니즘을 밝히고 인류를 위해 기여할 것이다. 해당 연구는 마이크로 로봇의 합동 구동, 미세유체 운송, 환경 모니터링 등의 분야에서 중요한 역할을 할 전망이다. 관련 연구 성과는 국제학술지 “Chemical Engineering Journal”에 게재되었다. 정보출처 : https://mp.weixin.qq.com/s/cYOt6wtC29H9lRbgEZvbOg |
SEARCH
- 정책동향
- 이슈리포트
- 통계DB
- 통계DB