| 란저우연구소, 애벌레처럼 기어다니는 바이오 폴리머 구현 | ||
|
||
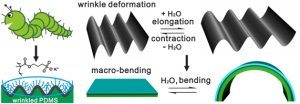 최근, 중국과학원 란저우(蘭州)화학물리연구소 저우펑(周峰) 연구원은 협력자와 공동으로 바이오닉 애벌레(Bionic Caterpillars) 구조를 이용하여 주름 구조의 폴리디메틸실록산(polydimethylsiloxane, PDMS) 표면 접목 응답성 폴리전해질 브러쉬(Polyelectrolyte brushes)를 통해 이방성, 순간 응답성 등 성능을 보유한 구동 장치를 개발하였다. 자연계의 생물 조직 혹은 기관은 모두 물리/화학 신호를 사지(Limb) 운동으로 전환시키는 기능을 보유하고 있다. 응답성 폴리머는 여러 가지 구동 장치 제조에 광범위하게 이용되며, 폴리머 브러쉬는 특수한 표면 물리화학적 성질이 있으므로 각종 응답성 장치에 폭넓게 응용되고 있다. 폴리머 브러쉬는 본드 앵커(Bond anchor)를 통해 표면에 고정될 수 있고, 표면에서 지향성이 있으므로 환경 변화가 발생할 때 가역적인 형태 변화를 발생시키게 된다. 물은 자연계에서 생물 생존, 번식의 중요한 자원이기 때문에 습도 응답성 폴리머는 연구자들의 흥미를 불러일으키고 있다. 그러나 습도 응답성 폴리머는 물 분자가 구동 장치에서의 확산 속도가 비교적 느려서 구동 속도가 비교적 늦고, 특히 체적이 큰 구동 장치에 대한 구동 속도가 더욱 늦고, 동시에 굽힘 변형 과정에서 체적 변화를 동반함으로 정밀 장치 제조에 불리하다. 동시에 대부분 상황에서 기질 형태는 구동 과정에 중요한 영향을 미치지만 해당 상황에 대한 연구는 비교적 적다. 저우펑(周峰) 연구팀은 PDMS 탄성체 박막 표면에서 원자 전이 유발, 자유기 중합 접목 및 습도 응답성 폴리전해질 브러시를 통하여 애벌레의 운동을 시뮬레이션 하였다. 폴리머 브러쉬는 기질 표면에서 기타 폴리머 재료에 비하여 더욱 우수한 왜곡도 구조 워핑도(Warping degree)를 보유하고 있으므로 물 분자가 구동 장치에서의 확산에 유리하고, 구동 속도를 향상시켰다. 그리고 폴리머 사슬은 습도 변화 조건에서 가역적인 팽창, 수축이 발생하므로 해당 장치의 응답 속도는 아주 빠르며, 동시에 주름 방향은 굽힘 방향을 결정한다. 그러므로 주름 제어를 통하여 나선형, 계단식으로 휘어지는 등 복잡한 3차원 구조를 형성할 수 있다. 주름 운동으로 또한 부분적인 생물의 방향 운동을 시뮬레이션 할 수 있는데 예를 들면 애벌레 크롤링(Crawling)은 바디 피부의 확장 및 수축을 통해 피부의 주름 형태와 운동을 변화시킬 수 있다. 정보출처 : http://www.360doc.com/content/15/0524/09/20625606_472838396.shtml |
SEARCH
- 정책동향
- 이슈리포트
- 통계DB
- 통계DB