| 하얼빈공업대학, 생체모방 미니로봇 개발 | ||
|
||
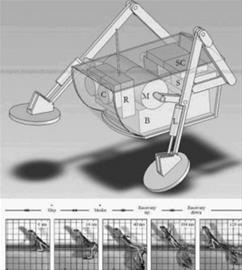 하얼빈공업대학 화학공업단과대학 판친민(潘钦敏) 교수 연구팀은 소금쟁이 점프능력을 모방하는 바이오 마이크로로봇을 최초로 개발했다. 로봇은 물위를 걸을 수 있을 뿐만 아니라 물위 연속 점프가 가능하다. 날렵한 점프능력은 군사정찰, 수질오염 모니터링 또는 기타 임무수행 과정에서 장애물을 피할 수 있다. 관련 논문은 2012년 7월 26일자 미국 화학학회에서 출간한 <응용재료 및 계면(Applied Materials & Interfaces>저널에 등재되었다. 본 연구는 하얼빈공업대학 로봇국가중점실험실과 국가자연과학기금위원회의 지원으로 수행되었다. 물위 점프가 가능한 이 로봇은 마이크로 직류전기의 엔진, 감속기 기어장치를 포함한 신형 구동시스템을 적용했다. 재료 설계에서 다공성/초소수성 니켈 폼(nickel foam)으로 로봇의 3개 지지다리와 2개의 점프용 다리를 만들었다. 로봇은 중량이 11g으로, 1,100 마리의 소금쟁이에 해당된다. 실험에서 로봇의 매번 점프 높이가 14cm이고, 점프 거리는 35cm로 몸체 길이의 2배 이상이다. 연구팀은 소금쟁이 지지다리에 서로 다른 힘을 가하고, 수치 모델과 시뮬레이션 계산 분석을 통해 초소수성 재료가 지지다리로 하여금 위로 힘을 가하도록 하며 점프 과정에서 에너지소비를 줄이는 키포인트임을 발견했다. 정보출처 : http://digitalpaper.stdaily.com:81/http_www.kjrb.com/kjrb/html/2012-07/28/content_164644.htm?div=-1 |
SEARCH
- 정책동향
- 이슈리포트
- 통계DB
- 통계DB